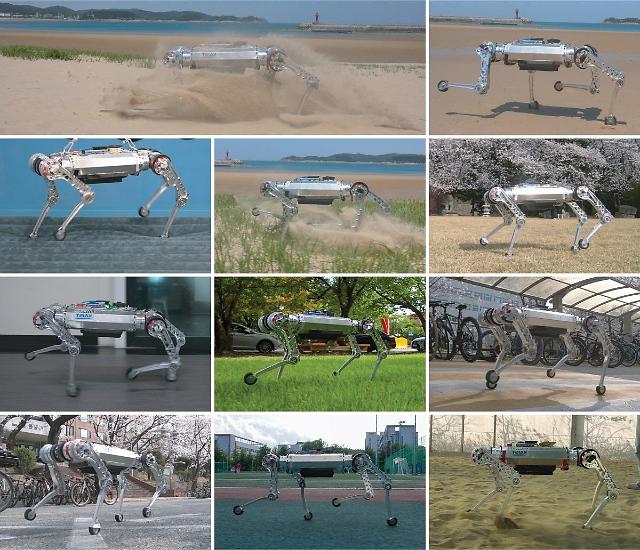
KAIST는 황보제민 기계공학과 교수 연구팀이 모래 등 변화하는 지형에서도 안정적으로 고속 주행할 수 있는 보행 로봇 제어기술을 개발했다고 26일 밝혔다.[사진=KAIST]
한국과학기술원(KAIST)은 황보제민 기계공학과 교수 연구팀이 유동성이 있는 지형에서도 민첩하고 견고하게 보행할 수 있는 4족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래 등 입상 물질로 이루어진 지반에서 로봇 보행체가 지면에 주는 힘을 모델링하고, 이를 시뮬레이션하는 기술을 개발했다. 특히 사전에 학습된 정보 없이도 다양한 지반 종류에 스스로 적응하는 인공신경망 구조를 도입해 강화학습에 적용했다.
학습된 제어기는 해변 모래사장에서 고속으로 이동하거나 에어 매트리스 위에서 회전하는 등 변화하는 지형에서 견고성을 입증했다. 이를 통해 향후 4족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
최수영 기계공학과 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 '사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다.
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과를 수집하고 이를 기반으로 실제 임무를 수행하는 학습 방법이다. 이때 필요한 데이터의 양이 많아, 실제 환경의 물리 현상을 시뮬레이션으로 구현해 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기는 시뮬레이션에서 수집한 데이터로 학습하고, 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 수행한다. 다만 학습한 시뮬레이션 환경과 실제 환경이 다른 경우 성능이 급격히 떨어진다. 때문에 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 '지반 반력 모델'을 기반으로 로봇이 움직이면서 접촉면에 발생하는 힘을 모델로 구현했다. 또한 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 해석해 변형하는 지형을 효율적으로 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 수집된 시계열 데이터를 분석하는 순환 신경망을 사용해, 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 '라이보'에 탑재했다. 로봇 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 초속 3.03m의 고속 보행을 선보였으며, 추가 조정 작업 없이 풀밭, 육상 트랙, 단단한 땅 등에서도 지반 특성에 적응해 안정하게 주행할 수 있었다.
에어 매트리스 위에서는 초당 약 90도의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 보행 로봇의 지형 극복 범위를 넓히고, 로봇이 실제적 임무를 수행하는 데에 기여할 수 있을 것으로 기대된다.
최수영 연구원은 "학습 기반 제어기에 변형하는 지반과 가까운 시뮬레이션 환경을 제공하는 것이 지형 적응에 필수적이라는 것을 보였다"며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어, 다양한 로봇 보행 연구에 접목될 수 있다"고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
황보 교수 연구팀은 모래 등 입상 물질로 이루어진 지반에서 로봇 보행체가 지면에 주는 힘을 모델링하고, 이를 시뮬레이션하는 기술을 개발했다. 특히 사전에 학습된 정보 없이도 다양한 지반 종류에 스스로 적응하는 인공신경망 구조를 도입해 강화학습에 적용했다.
학습된 제어기는 해변 모래사장에서 고속으로 이동하거나 에어 매트리스 위에서 회전하는 등 변화하는 지형에서 견고성을 입증했다. 이를 통해 향후 4족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
최수영 기계공학과 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 '사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다.
특히 보행 로봇 분야에서 학습 기반 제어기는 시뮬레이션에서 수집한 데이터로 학습하고, 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 수행한다. 다만 학습한 시뮬레이션 환경과 실제 환경이 다른 경우 성능이 급격히 떨어진다. 때문에 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 '지반 반력 모델'을 기반으로 로봇이 움직이면서 접촉면에 발생하는 힘을 모델로 구현했다. 또한 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 해석해 변형하는 지형을 효율적으로 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 수집된 시계열 데이터를 분석하는 순환 신경망을 사용해, 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 '라이보'에 탑재했다. 로봇 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 초속 3.03m의 고속 보행을 선보였으며, 추가 조정 작업 없이 풀밭, 육상 트랙, 단단한 땅 등에서도 지반 특성에 적응해 안정하게 주행할 수 있었다.
에어 매트리스 위에서는 초당 약 90도의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 보행 로봇의 지형 극복 범위를 넓히고, 로봇이 실제적 임무를 수행하는 데에 기여할 수 있을 것으로 기대된다.
최수영 연구원은 "학습 기반 제어기에 변형하는 지반과 가까운 시뮬레이션 환경을 제공하는 것이 지형 적응에 필수적이라는 것을 보였다"며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어, 다양한 로봇 보행 연구에 접목될 수 있다"고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.

이상우 기자lswoo@ajunews.com
기자의 다른기사
©'5개국어 글로벌 경제신문' 아주경제. 무단전재·재배포 금지


![[르포] 중력 6배에 짓눌려 기절 직전…전투기 조종사 비행환경 적응훈련(영상)](https://image.ajunews.com/content/image/2024/02/29/20240229181518601151_258_161.jpg)



