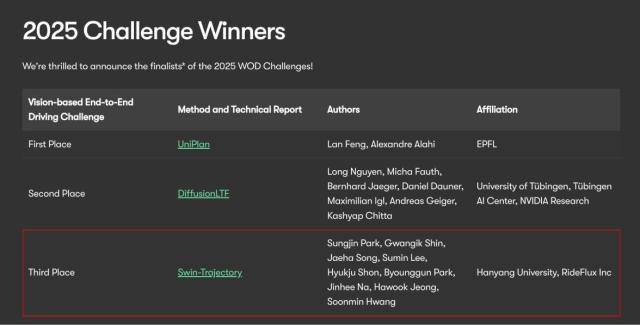
라이드플럭스는 이번 챌린지에 한양대학교 IRCV 연구팀과 공동으로 참가해 웨이모가 공개한 카메라 영상 데이터를 기반으로 자율주행차의 이동 경로를 효과적으로 계획하는 모델을 제안했다. 비전 기반 E2E 자율주행 부문은 엔비디아, 샤오미, 스위스 로잔연방공대, 캐나다 밀라(MILA) 인공지능(AI) 연구소 등 전세계에서 29개 자율주행 연구개발팀이 참가해 웨이모 챌린지 전체 부문 중 가장 경쟁이 치열했다.
라이드플럭스와 한양대 연구팀이 제안한 'Swin-Trajectory' 방법은 AI 기술로 구조화된 차량 이력과 이미지의 맥락을 파악해 미래 궤적을 계획하는 알고리즘이다. 이 방법은 효과적인 시공간 모델링을 바탕으로 정확도가 높을 뿐 아니라, 상용 그래픽처리장치(GPU)에서 약 14ms로 실행될 만큼 연산속도가 빨라 실시간 처리속도가 중요한 자율주행에 적합하다.
비전 기반 E2E 자율주행은 최근 자율주행 업계에서 주목받는 글로벌 기술 트렌드다. E2E 기술이 적용된 자율주행 시스템은 인공지능 모델로 다양한 주행 영상 데이터를 학습하고, 이를 기반으로 자율주행차가 실제 주행 환경에서 인지, 예측, 판단, 제어를 통합적으로 수행하도록 설계된다.

윤선훈 기자chakrell@ajunews.com
기자의 다른기사
©'5개국어 글로벌 경제신문' 아주경제. 무단전재·재배포 금지


![[르포] 중력 6배에 짓눌려 기절 직전…전투기 조종사 비행환경 적응훈련(영상)](https://image.ajunews.com/content/image/2024/02/29/20240229181518601151_258_161.jpg)



