카이스트(KAIST)가 개발한 사족보행 로봇 '라이보(Raibo)'가 계단, 틈, 벽, 잔해 등 불연속적이고 복잡한 지형에서도 고속으로 이동할 수 있게 됐다. 라이보는 조만간 재난 현장 탐색이나 산악 수색 등 실질적인 임무 수행에 투입 될 것으로 기대된다.
KAIST는 황보제민 기계공학과 교수 연구팀 시속 14.4km(4m/s) 고속 보행이 가능한 사족 보행 로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
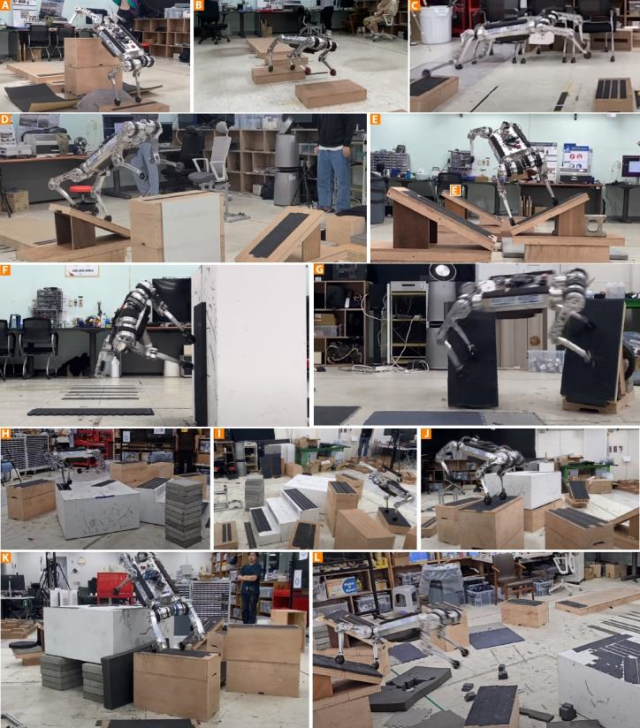
연구팀에 따르면 라이보는 수직 벽을 달리고, 1.3m 폭의 간격을 뛰어넘는다. 징검다리 위를 시속 약 14.4km로 질주할 수 있으며 30도(°) 경사·계단·징검다리가 혼합한 지형에서도 빠르고 민첩하게 움직이는 성능을 입증했다.
이를 위해 연구팀은 발 디딤 위치(foothold)를 계획하는 플래너(planner)와 발 디딤 위치를 정확히 따라가는 트래커(tracker)를 개발했다.
플래너 모듈의 경우 기존 방법과 달리 달 디딤 위치만 탐색 공간으로 삼아 계단 부담을 낮췄다. 트래커 모듈은 플래너가 결정한 위치에 로봇의 발이 정확히 닿도록 학습시켰다.
연구팀은 모델과 트래커를 동시에 학습해, 트래커가 점진적으로 어려운 난이도의 지형에 적응할 수 있도록 설계했다. 이후 학습한 트래커의 특성과 성능을 반영할 수 있도록 트래커가 실행 가능한 발 디딤 위치 계획을 생성하는 샘플링 기반 플래너를 설계했다.
연구팀은 "이 구조로 라이보가 다양한 장애물과 불연속 지형에서 고속 보행 능력을 갖출 수 있었고 처음보는 지형에 대해서도 범용적으로 적용할 수 있음이 입증됐다"며 "앞으로 로봇이 재난 현장 탐색이나 산악 수색 등 실제적 임무를 수행하는 데 이바지할 수 있을 것"이라고 했다.
한편 이번 연구 성과는 국제 학술지 사이언스 로보틱스(Science Robotics) 2025년 5월호에 게재됐다.

©'5개국어 글로벌 경제신문' 아주경제. 무단전재·재배포 금지


![[르포] 중력 6배에 짓눌려 기절 직전…전투기 조종사 비행환경 적응훈련(영상)](https://image.ajunews.com/content/image/2024/02/29/20240229181518601151_258_161.jpg)



