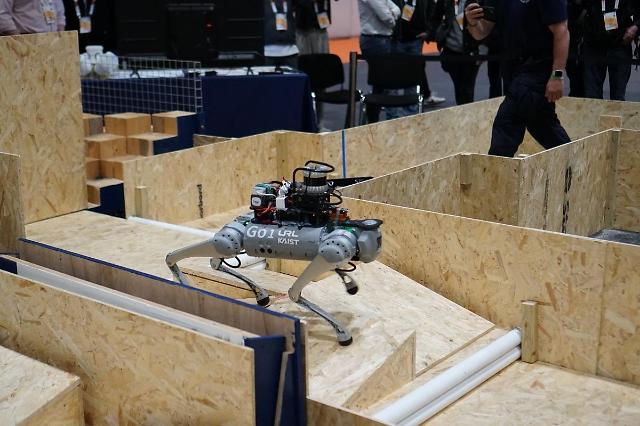
KAIST 연구팀의 자세 제어기 '드림워크'를 탑재한 유니트리사의 로봇이 ICRA 2023 사족보행 로봇 챌린지에 참가하고 있다. [사진=KAIST]
국내 연구팀이 개발한 자율보행 로봇 제어 기술이 국제 경진대회에서 압도적인 1위를 기록했다.
한국과학기술원(KAIST) 명현 전자및전기공학부 교수 연구팀은 지난 6월 1일 'ICRA 2023 사족보행 로봇 챌린지'에서 로봇 동작 제어기 '드림워크'를 탑재한 사족보행 로봇으로 1위를 차지했다고 6일 밝혔다. ICRA는 국제 전기전자공학자협회(IEEE)가 주최하는 로봇·자동화 학술대회다.
KAIST 팀은 전 세계 11개 팀이 참여한 대회에서 총점 246점으로 1위를 거뒀다. 2위를 차지한 매사추세츠 공과대학(MIT)의 60점과 비교하면 4배 이상 높은 점수다. 특히 자율보행으로 가장 빠르게 움직이며 최고 점수를 획득한 점도 주목할만하다. 결승전에서 원격 수동조작 위주의 팀은 약 49분의 완주 시간을 기록했다. 반면, KAIST 팀은 자율보행 위주로 41분 52초의 완주 시간을 기록했다.
로봇을 원격에서 직접 제어하면 상대적으로 쉬운 조종이 가능하다. 하지만, 가시거리를 벗어나면 카메라나 센서 등을 이용해 로봇 상태를 추측해야 한다. 만약 통신 지연이나 단절로 정보 취득이 원활하지 못하면 제어가 어렵다.
연구팀은 이러한 문제를 자율보행 기술로 해결할 수 있다고 설명했다. 자율보행 시스템에는 로봇 동작 제어기뿐만 아니라 △위치와 주변 환경을 추정하는 기술 △이동 경로를 계획하는 기술도 함께 필요하다.
KAIST 연구팀은 로봇이 다양한 지면에서 스스로 걸을 수 있도록 카메라, 3차원 라이다, 관성 센서, 관절 센서 등 다양한 장치로 획득된 정보를 모두 사용했다. 방대한 정보를 소형 컴퓨터 하나로 분석해, 경로까지 실시간으로 짜도록 효율적인 시스템을 구축한 것이 강점이다. 주변 지형을 파악하는 라이다 센서 대신 상대적으로 저렴한 깊이 인식 카메라를 이용할 수도 있다.
드림워크를 탑재한 로봇은 장애물 높이와 로봇 크기를 고려해 넘어지는 상황을 최소화한다. 만약 넘어지더라도 자동으로 다시 일어날 수 있도록 인공지능(AI) 기반 자세 재회복 기술도 탑재했다.
명현 KAIST 교수는 "동작 제어기뿐만 아니라 주변 환경 인지, 경로 계획 등 모든 기술은 연구팀이 독자적으로 개발해, 국내 로봇 산업 경쟁력 제고에 이바지할 것으로 기대한다"고 밝혔다.
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행했다.
한국과학기술원(KAIST) 명현 전자및전기공학부 교수 연구팀은 지난 6월 1일 'ICRA 2023 사족보행 로봇 챌린지'에서 로봇 동작 제어기 '드림워크'를 탑재한 사족보행 로봇으로 1위를 차지했다고 6일 밝혔다. ICRA는 국제 전기전자공학자협회(IEEE)가 주최하는 로봇·자동화 학술대회다.
KAIST 팀은 전 세계 11개 팀이 참여한 대회에서 총점 246점으로 1위를 거뒀다. 2위를 차지한 매사추세츠 공과대학(MIT)의 60점과 비교하면 4배 이상 높은 점수다. 특히 자율보행으로 가장 빠르게 움직이며 최고 점수를 획득한 점도 주목할만하다. 결승전에서 원격 수동조작 위주의 팀은 약 49분의 완주 시간을 기록했다. 반면, KAIST 팀은 자율보행 위주로 41분 52초의 완주 시간을 기록했다.
로봇을 원격에서 직접 제어하면 상대적으로 쉬운 조종이 가능하다. 하지만, 가시거리를 벗어나면 카메라나 센서 등을 이용해 로봇 상태를 추측해야 한다. 만약 통신 지연이나 단절로 정보 취득이 원활하지 못하면 제어가 어렵다.
KAIST 연구팀은 로봇이 다양한 지면에서 스스로 걸을 수 있도록 카메라, 3차원 라이다, 관성 센서, 관절 센서 등 다양한 장치로 획득된 정보를 모두 사용했다. 방대한 정보를 소형 컴퓨터 하나로 분석해, 경로까지 실시간으로 짜도록 효율적인 시스템을 구축한 것이 강점이다. 주변 지형을 파악하는 라이다 센서 대신 상대적으로 저렴한 깊이 인식 카메라를 이용할 수도 있다.
드림워크를 탑재한 로봇은 장애물 높이와 로봇 크기를 고려해 넘어지는 상황을 최소화한다. 만약 넘어지더라도 자동으로 다시 일어날 수 있도록 인공지능(AI) 기반 자세 재회복 기술도 탑재했다.
명현 KAIST 교수는 "동작 제어기뿐만 아니라 주변 환경 인지, 경로 계획 등 모든 기술은 연구팀이 독자적으로 개발해, 국내 로봇 산업 경쟁력 제고에 이바지할 것으로 기대한다"고 밝혔다.
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행했다.

이상우 기자lswoo@ajunews.com
기자의 다른기사
©'5개국어 글로벌 경제신문' 아주경제. 무단전재·재배포 금지


![[르포] 중력 6배에 짓눌려 기절 직전…전투기 조종사 비행환경 적응훈련(영상)](https://image.ajunews.com/content/image/2024/02/29/20240229181518601151_258_161.jpg)



